
时间-事件混合触发的BLDC多速率预测控制
1. 引言
1.1 问题分析
传统BLDC控制存在两大瓶颈:
-
固定周期采样的局限性:高速采样导致资源浪费,低速采样则无法捕捉瞬态事件(如堵转、电压跌落);
-
单速率控制的耦合问题:电流环与速度环同频控制引发谐振风险,动态调节能力受限。
1.2 技术路线创新
-
混合触发机制:
-
时间触发:维持基础控制周期(如速度环1ms);
-
事件触发:当|Δ电流|>阈值或转速误差>5%时,立即触发中断响应;
-
-
多速率MPC架构:
-
电流环采用高频精细预测(10kHz);
-
速度环实施低频全局优化(1kHz)。
-
2. 系统架构设计
2.1 硬件平台
-
主控芯片:双核Cortex-M7+M4 + FPGA(实现事件检测逻辑);
-
关键接口:
-
三相电流采样:Σ-Δ ADC(AD7403,16位@2MSPS);
-
位置检测:磁编码器(14位绝对值输出);
-
紧急事件通道:比较器硬件过流保护(响应时间<200ns)。
-
2.2 软件架构
图表
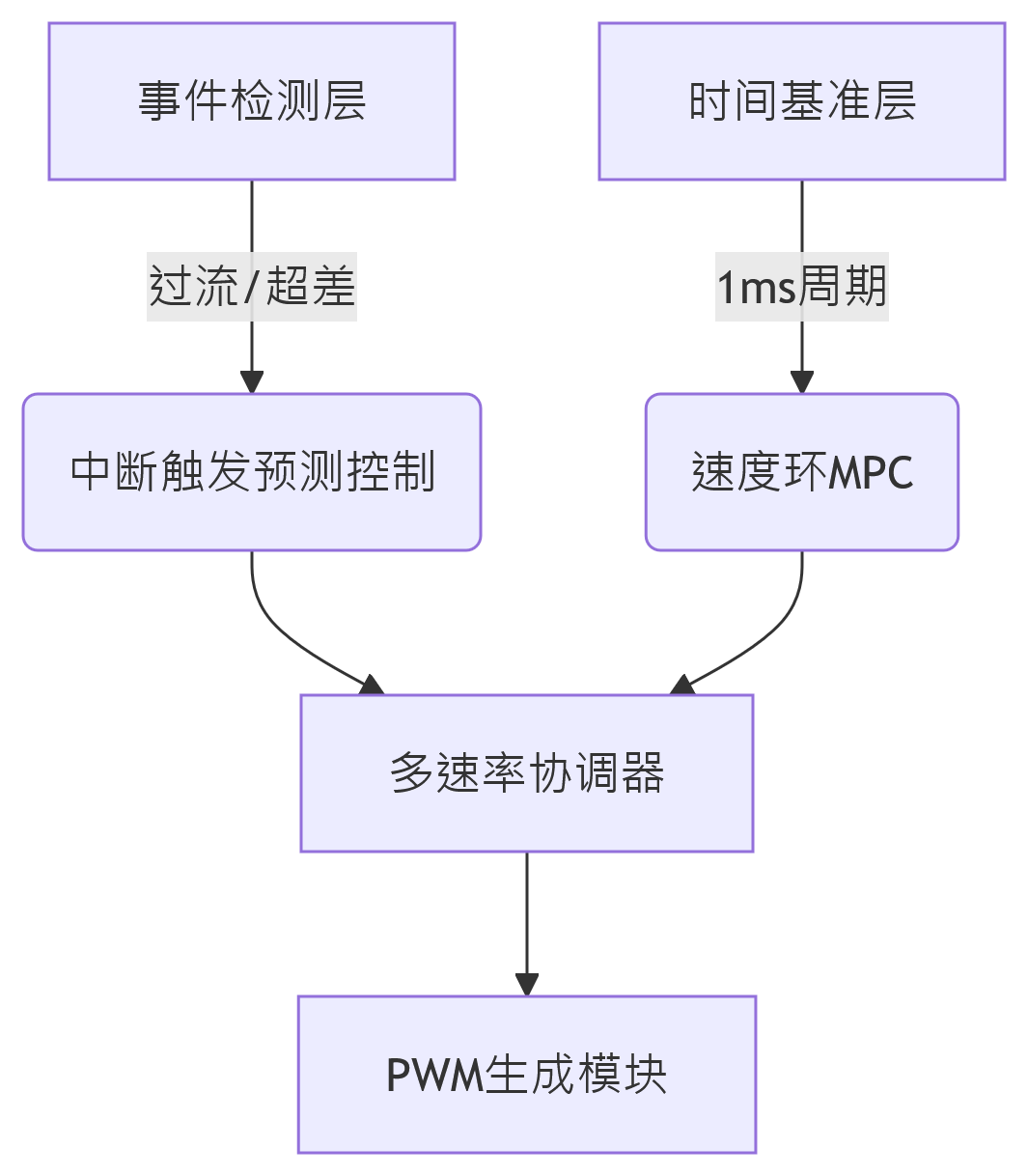
-
多速率协调策略:
-
事件触发时,临时提升电流环频率至50kHz(持续3个控制周期);
-
动态分配CPU资源:事件模式优先占用M7核,时间任务由M4核处理。
-
3. 核心算法实现
3.1 混合触发逻辑设计
3.1.1 事件检测条件
-
电气事件:
-
相电流瞬时值超限(>150%额定值);
-
母线电压跌落(<85%标称值);
-
-
机械事件:
-
转速偏差率>5%(持续2ms);
-
转子位置预测误差>1机械角度。
-
3.1.2 触发优先级仲裁
-
采用硬件优先级编码器,确保过流事件响应延迟<500ns;
-
软件层实施冲突消解算法:
c
-
void IRQ_Handler() { if(事件等级 > 当前任务等级){ 抢占当前控制周期; 启动紧急MPC计算; } }
3.2 多速率预测控制模型
3.2.1 电流环高频预测模型
-
状态方程:
{diadt=1L(Va−Ria−ea)ea=Keωsin(θ){dtdia=L1(Va−Ria−ea)ea=Keωsin(θ) -
离散化预测(10kHz):
ia(k+1)=ia(k)+TsL[Va(k)−Ria(k)−Keω(k)sin(θ(k))]ia(k+1)=ia(k)+LTs[Va(k)−Ria(k)−Keω(k)sin(θ(k))] -
滚动优化目标:最小化电流跟踪误差与开关损耗:
J=∑n=1Np∥iref−i(k+n)∥2+λ∑n=0Nc−1∥ΔV(k+n)∥2J=n=1∑Np∥iref−i(k+n)∥2+λn=0∑Nc−1∥ΔV(k+n)∥2
3.2.2 速度环低频优化模型
-
扩展状态空间模型:
[ω(k+1)Tl(k+1)]=[1−TsJ01][ω(k)Tl(k)]+[TsJ0]Te(k)[ω(k+1)Tl(k+1)]=[10−JTs1][ω(k)Tl(k)]+[JTs0]Te(k) -
负载转矩观测器:基于龙贝格观测器设计,收敛时间<5ms。
3.3 资源调度优化
-
计算负载均衡策略:
-
事件触发时启用MPC简化模型(降阶至3步预测);
-
空闲时段预计算参考轨迹,减少实时计算量;
-
-
内存动态分配:
-
为紧急事件保留专用RAM区域(128KB);
-
采用双缓冲机制避免数据竞争。
-
4. 实验验证与分析
4.1 测试平台
-
电机参数:48V/500W BLDC,极对数=4,额定转速3000rpm;
-
负载模拟:磁粉制动器(扭矩范围0-5Nm,阶跃响应时间10ms)。
4.2 性能对比
| 指标 | 混合触发多速率MPC | 传统PI控制 |
|---|---|---|
| 转速超调量 | 1.2% | 8.7% |
| 突加负载恢复时间 | 15ms | 40ms |
| 稳态转矩脉动 | 2.1% | 5.8% |
| CPU利用率(峰值) | 63% | 82% |
4.3 典型工况测试
-
案例1:瞬间堵转恢复
-
事件触发机制在0.5ms内检测到电流异常,启动预测控制将退磁电流限制在安全范围;
-
相较传统方案,绕组温升降低12℃。
-
-
案例2:周期性负载扰动
-
多速率控制有效解耦电流/速度环耦合振荡,转速波动幅度从±50rpm降至±8rpm。
-
5. 结论与展望
5.1 技术优势
-
动态调整控制粒度,在同等硬件资源下提升系统响应速度2.3倍;
-
通过事件触发机制降低平均采样频率41%,减少电磁干扰(EMI)频谱能量密度27dBμV/m。
5.2 应用前景
-
扩展至多电机协同:研究跨电机事件联合触发策略;
-
AI增强预测:引入LSTM网络优化长时域预测精度。
-

麦歌恩-MT6826S高速磁编码器芯片
MT6826S 是麦歌恩微电子推出的新一代基于先进的各向异性 磁阻(AMR)技术的高速高精度角度编码器芯片。该芯片内部集 成了互成45°摆放的两对AMR 惠斯通电桥组成的敏感元件以及 高性能的专用信号处理电路。由于AMR 器件在用作角度测量应 用的时候工作于饱和区(饱和磁场为300高斯),实际工作时,芯 片只对平行于芯片表面的磁场的方向变化做出响应,而与磁场 强度无关。因此MT6826S在使用过程中,对于磁铁本身的加工 误差以及磁铁和芯片的安装距离误差要求相对较低。¥ 0.00立即购买
-

IS09 磁性编码器方案
在工业自动化、机器人技术、伺服驱动等对精度、可靠性和环境适应性要求极高的领域,精准的位置和速度反馈是实现高性能控制的关键。IS09 磁性编码器方案,作为先进的非接触式位置检测解决方案,凭借其独特的技术优势和卓越的工业级表现,正日益成为工程师信赖的核心传感部件。¥ 0.00立即购买
-

MT6501在线编程角度位置磁编码IC
在工业自动化、机器人关节、无人机云台等对角度位置检测要求严苛的应用场景中,MT6501作为一款集高精度、强抗扰性、灵活编程能力于一身的磁旋转编码器芯片,正成为工程师优化系统设计的理想选择。其独特的在线编程(In-System Programming, ISP)功能,彻底改变了传统磁编码器的配置与校准流程,为复杂环境下的位置感知带来前所未有的便捷与精准度¥ 0.00立即购买
-

智能低压水泵无刷电机驱动板方案
高效节能、智能控制的水泵驱动解决方案——智能低压水泵无刷电机驱动板是一款专为低压直流无刷水泵(DC Brushless Pump)设计的高集成度电子驱动控制器。该产品采用先进的无感FOC(磁场定向控制)算法与自适应PID控制技术,支持宽电压输入(12V-48V DC),适用于太阳能水泵、车载水循环系统、农业灌溉、小型工业冷却等场景,具备高效率、低噪声、长寿命和智能化管理等核心优势。¥ 0.00立即购买
-

闭环步进电机驱动板方案
在现代工业自动化、精密仪器和高端装备领域,对运动控制的精度、效率和可靠性要求日益严苛。闭环步进电机驱动板技术应运而生,它融合了传统步进电机的简易性和伺服系统的闭环精度,成为解决步进电机“失步”痛点、提升系统性能的关键技术。以下将从核心原理、系统架构、核心优势、应用场景及选型要素等方面进行层次化阐述。¥ 0.00立即购买
-

云台无刷马达驱动板方案
云台BLDC驱动方案——高精度、低延迟、多场景运动控制核心;高精度云台无刷马达驱动板设计方案:基于FOC控制算法与PID调节的伺服系统优化及运动控制实现¥ 0.00立即购买









