
梯形控制的应用场景与工作原理
BLDC 电机驱动方案的梯形控制技术在工业与民用领域都有重要应用。从日常使用的白色家电,到制冷压缩机、暖通空调(HVAC)鼓风机、冷凝器,再到工业驱动设备、水泵以及机器人系统等,其控制系统设计都离不开梯形控制的助力。
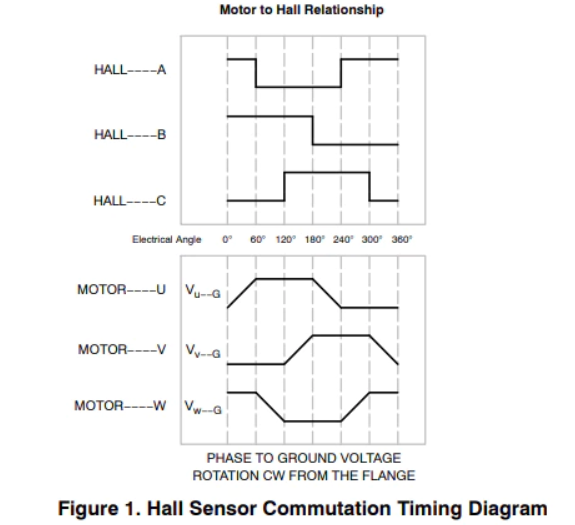
驱动电机的三相逆变器由 MOSFET 构成,这些 MOSFET 存在六种不同的开 / 关状态组合。这些组合在转子磁场的旋转平面内,能够产生六种定子磁场方向,因此梯形控制也被称为六步法或 120° 块换向。为了使定子和转子磁场相互作用产生最大转矩,六种逆变器状态需依据电机所需的旋转方向,遵循特定顺序切换。而转子位置反馈则可通过两种方式实现,一种是借助安装在电机上的霍尔传感器(有传感器方式),另一种是在电机旋转过程中感应电机相位的反电动势(无传感器方式),以此来确定准确的换向时机。
有传感器式与无传感器式梯形控制
有传感器式梯形控制的运行无需电压或电流反馈信号,它主要依靠霍尔传感器反馈的位置信息,来确定电机各相位的通电顺序。霍尔传感器安装于电机之上,利用转子永磁体旋转磁场引发的霍尔效应,实时感知转子位置。即使在电机启动的零速状态下,由于转子位置信息始终存在,也能顺利完成换向操作。
无传感器的梯形控制则另辟蹊径,通过利用电机旋转过程中产生的反电动势,来判断电机的换向顺序。在梯形控制模式下,同一时刻仅有两个电机相位处于通电状态,此时非通电相位无电流通过,为直接感应反电动势创造了条件。在非通电阶段,反电动势会呈现线性变化趋势。多数基于梯形控制的反电动势位置反馈技术,都依赖于反电动势过零检测(ZCD)方法。具体来说,就是实时监测反电动势,当它越过电机中性电压或直流总线电压一半的参考点时,即触发相应操作。

这两种控制方式各有优劣。有传感器的梯形控制虽然实施难度较低,但因霍尔传感器的安装,增加了成本,同时还需要额外布线,在一些特殊环境中可能并不适用。无传感器控制虽然避免了传感器安装带来的问题,但控制逻辑更为复杂,需要根据特定负载或工作条件进行针对性调整,而且在重载情况下,电机启动可能面临困难。不过,对于负载曲线固定,或负载随速度增加的应用场景,如风扇等设备,无传感器控制有着出色的表现。
设计 BLDC 电机控制系统的关键要素
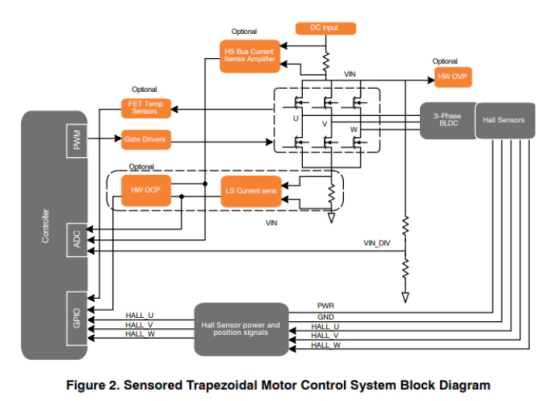
在进行 BLDC 电机驱动板控制设计时,除了核心的梯形控制策略,还有一些关键设计因素不容忽视。
过流保护(OCP)是保障系统安全运行的重要环节,可通过硬件、软件或两者结合的方式来实现,有效限制电流大小,降低硬故障发生的概率。过压保护(OVP)同样不可或缺,利用硬件、软件或二者协同,防止电机遭受破坏性电压冲击。过温保护(OTP)则着重关注逆变器中 MOSFET 的工作温度,尤其是在温度变化范围较大的环境中,这一保护机制尤为重要。
此外,MOSFET 的选型也至关重要。高能效屏蔽栅沟槽型 MOSFET 产品组合,能够依据不同的设计需求进行定制,有助于提升电机控制系统的整体性能。
高度集成化的电机控制方案在节能方面优势显著。梯形 BLDC 控制凭借简单的控制算法、较高的运行效率,以及结构相对简单的电机设计,不仅能够延长电机使用寿命,还能降低运营成本。当梯形控制与基础保护措施、先进设计技术相结合时,更能显著提升电机的控制精度,使其成为驱动电动工具和机器人电机的高效选择之一。
-

闭环步进电机驱动方案
闭环步进电机驱动方案是一种融合步进电机低成本优势与伺服系统高精度特性的创新技术,通过实时位置反馈与智能控制算法,彻底解决传统开环步进电机的“失步”和“过冲”问题。该方案广泛应用于工业自动化、医疗设备、3C制造、机器人等领域,尤其适合对成本敏感但需高动态响应的场景。¥ 0.00立即购买
-

云台无刷马达驱动板方案
云台BLDC驱动方案——高精度、低延迟、多场景运动控制核心¥ 0.00立即购买
-

风扇无刷电机驱动(板)方案
随着人们对电吹风的需求和要求不断增加,其能耗、噪音和风速等参数是考核产品最直接的标准。电机就是最电吹风重要的元件之一。为了满足人们在不同的使用场景和不同的使用环境,需要可调速范围广,噪音低、使用寿命长的电机。根据不同使用场景还需要有不同的模式。为了解决传统的交流电机无法满足用户节能、舒适要求的问题,艾毕胜电子充分发挥技术力量雄厚的优势,结合以往研发经验,开发出风扇无刷电机驱动解决方案。¥ 0.00立即购买
-

高速风机无刷电机方案
艾毕胜设计开发的高速风机无刷电机方案减小了电机的体积和重量,滚筒风叶可保证电机出风均匀、快速,无刷电机可实现风筒对多种转速的精确控制和应用集成的需求。该方案可实现电机工作时的低振动,使用者持握电吹风时具有舒适的手感。艾毕胜电子技术力量雄厚,拥有多年研发经验,根据客户需求定制出符合或者超越客户需求的高速风机无刷电机方案,是一家可靠的无刷电机方案供应商和制造商。¥ 0.00立即购买
-

扫地机器人无刷电机驱动板方案
本BLDC/无刷直流马达驱动板方案是专为现代扫地机器人设计的核心动力控制单元,集高性能电机驱动、多重安全保障与智能控制于一体。方案采用模块化设计,支持直流有刷(BDC)与无刷直流(BLDC)电机,满足扫地机行进、边刷、主刷及升降等全场景动力需求,为整机提供高效、可靠、低噪的驱动解决方案。¥ 0.00立即购买
-

吸尘器无刷电机驱动板方案
吸尘器bldc驱动方案—高转速、低噪声、长续航的智能动力核心;艾毕胜电子吸尘器无刷马达驱动板是新一代清洁设备的核心动力模块,针对传统有刷电机效率低(<65%)、噪声大(>75dB)、寿命短(<500小时)等痛点,提供高性能BLDC驱动解决方案。适配手持/立式/扫地机器人等产品形态,实现10万+RPM转速、<60dB噪声、2000+小时寿命的技术跃迁。¥ 0.00立即购买






